|
Sid Srikanth I'm an undergraduate researcher at the University of Southern California in Los Angeles. I am grateful to be co-advised by Stefanos Nikolaidis and Daniel Seita. I am fortunate to have previously collaborated with Katia Sycara, Michael Lewis, John Krumm, Cyrus Shahabi, and Ashish Amresh. I'm originally from Denver, Colorado. In my free time, I love to explore Los Angeles and am a big Denver sports fan! Feel free to reach out to me at ssrikant [at] usc [dot] edu if you have any inquiries or just want to chat :)
I am actively applying to PhD programs starting in Fall 2026! |

|
ResearchMy research objective is to develop embodied agents that can continually adapt, generalize, and act safely with humans in a dynamic and changing world. My undergraduate research explores this problem through the lens of quality diversity optimization and scenario generation. I also conduct research in causality inference and path planning using geospatial data. |
Past work |
|
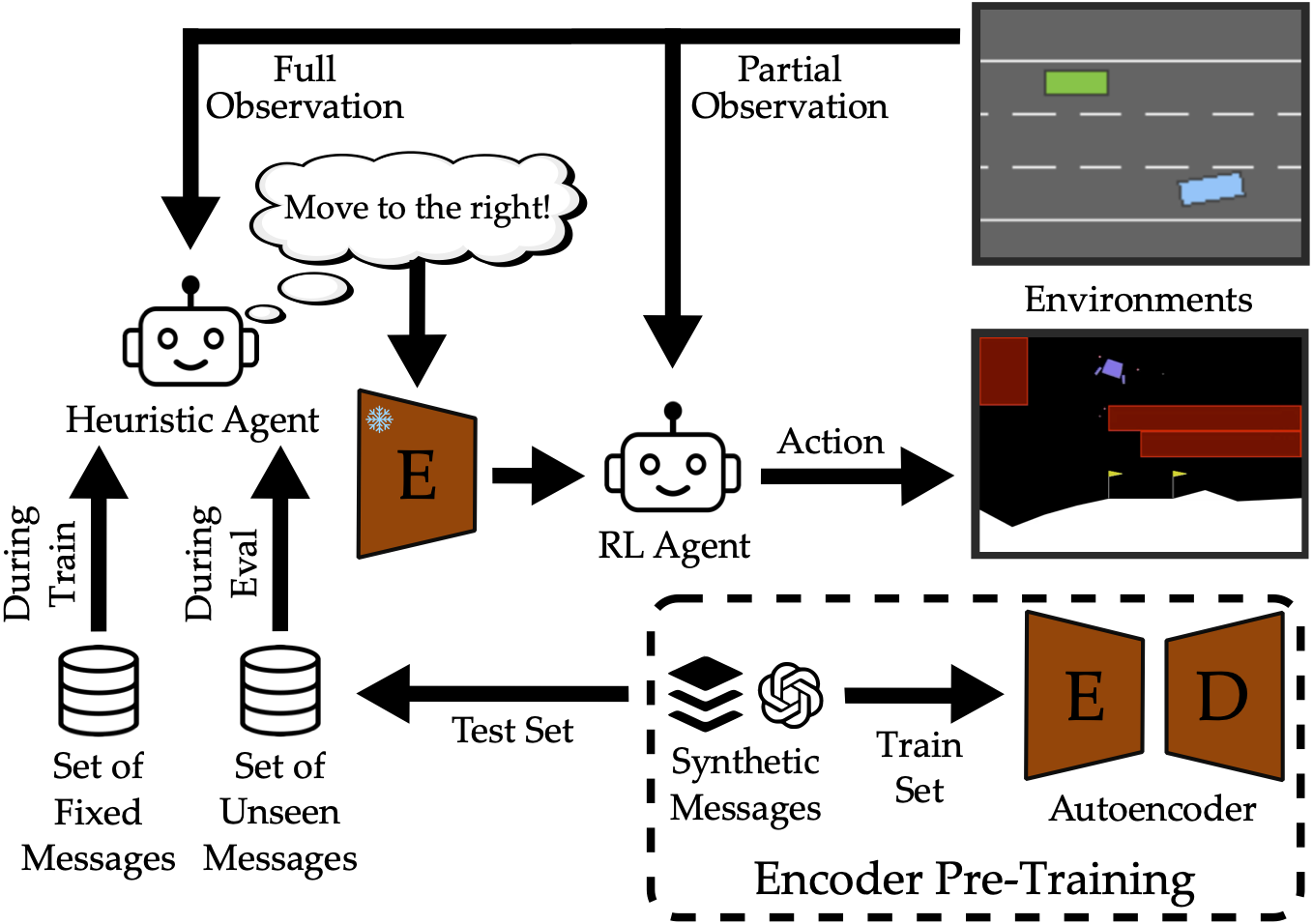
Semantic Encoders Enable Robust Communication-Aware Reinforcement Learning Policies
Siddharth Srikanth, Varun Bhatt, Darius Mahjoob, Sophie Hsu, Aaquib Tabrez, Stefanos Nikolaidis Tom4AI @ AAAI 2026 / arXiv We present a framework for training RL agents that understand natural language messages and adapt to unseen messages during evaluation. |
|
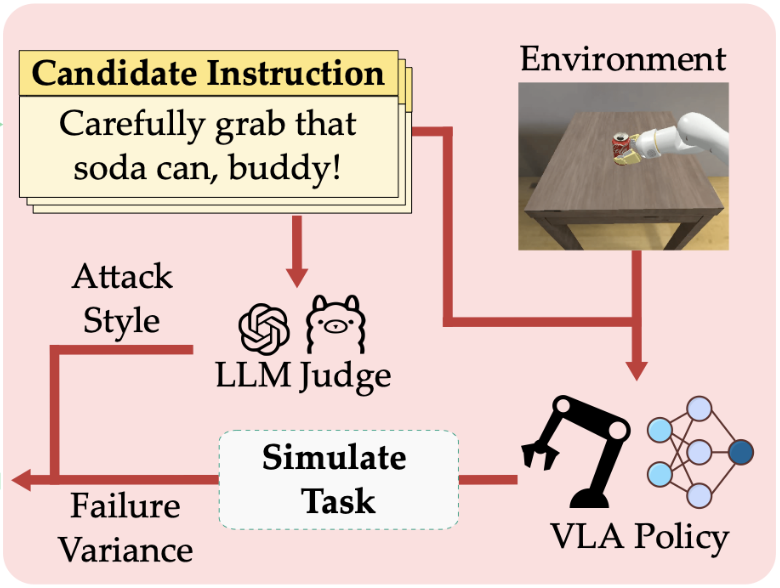
Red-Teaming Vision-Language-Action Models via Quality Diversity Prompt Generation for Robust Robot Policies
Siddharth Srikanth, Freddie Liang, Sophie Hsu, Varun Bhatt, Shihan Zhao, Henry Chen, Bryon Tjanaka, Minjune Hwang, Akanksha Saran, Daniel Seita*, Aaquib Tabrez*, Stefanos Nikolaidis* In Submission / arXiv We introduce Q-DIG, a novel red-teaming framework for generating diverse task instructions that induce failures in SoTA Vision-Language-Action models using Quality Diversity. We then provide a methodology to leverage these failure modes to improve policies. |
|
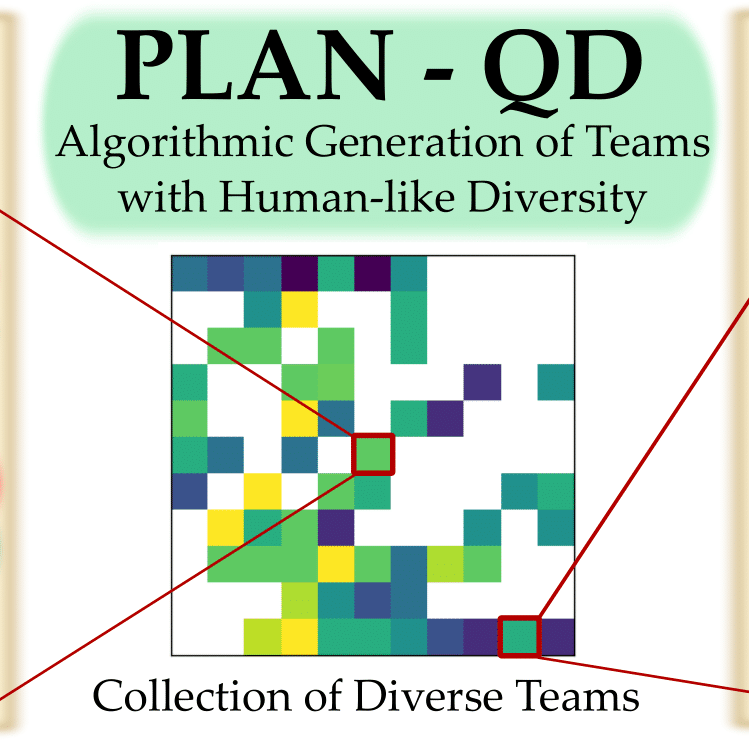
Algorithmic Prompt Generation for Diverse Human-like Teaming and Communication with Large Language Models
Siddharth Srikanth, Varun Bhatt, Boshen Zhang, Werner Hager, Charles Michael Lewis, Katia P. Sycara, Aaquib Tabrez, Stefanos Nikolaidis GECCO 2026 / GenAI-HRI @ RSS 2025 / arXiv We introduce PLAN-QD: a framework that algorithmically generates a population of diverse, human-like teaming and communicative behaviors by leveraging LLM-powered agents and Quality Diversity, an evolutionary learning framework. |
|
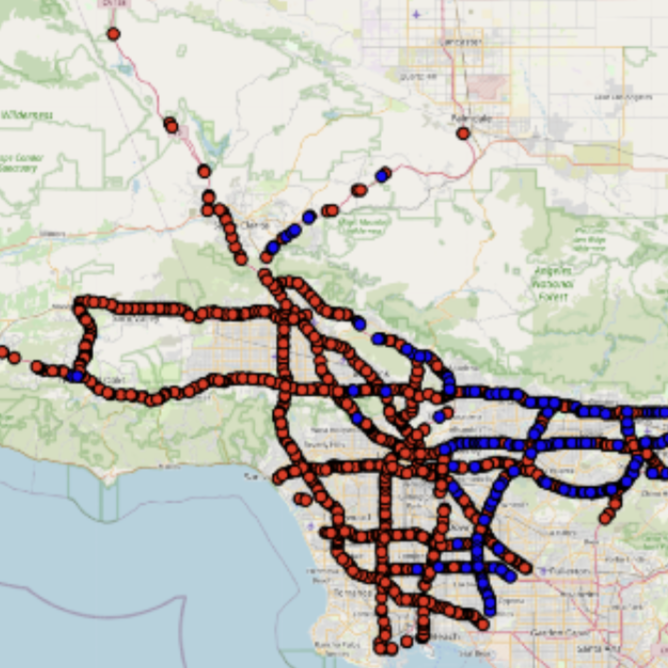
NEXICA: Discovering Road Traffic Causality
Siddharth Srikanth, John Krumm, Jonathan Qin SIGSPATIAL 2025 / arXiv (extended version) We present NEXICA, an algorithm to discover which parts of a highway system tend to cause slowdowns on other parts of a highway. We evaluate our approach on 6 months of timeseries data on 195 stations in Los Angeles, and show that it can efficiently discover causality relationships that are consistent with human intuition. |
|
Design and source code from Jon Barron's website |